High-Dimensional Learning for Robot Control
When learning representations for robot control, the quality of the learned model (whether of the world, task or system itself) depends on the quality of data used and how the data is used to build the model. but how do we ensure that we explore and receive valuable information, particularly for high-dimensional search spaces where the information is sparse or hard to interpret (and therefore learn from)? Furthermore, in high-dimensional sensor systems, how can we efficiently utilize the data in order to use it for real-time control?
Multimodal Sensory Learning for Real-time Adaptive Manipulation
Adaptive control for real-time manipulation requires quick estimation and prediction of object properties. While robot learning in this area primarily focuses on using vision, many tasks cannot rely on vision due to object occlusion. I focus on developing methods for using multimodal sensory fusion of tactile and audio data to quickly characterize and predict an object’s properties. The predictions are used in a adaptive grasp controller to compensate for the predicted inertial forces experienced during motion. Drawing inspiration from how humans interact with objects, I investigate how to best utilize different sensory signals and actively interact with and manipulate objects to quickly learn their object properties for safe manipulation. By exploring the information content and quality in different sensory modalities, I develop algorithms that autonomously extract the relevant task information to maintain grasp stability during manipulation.
For more information, check out the paper and my talk on this work.
K-L Ergodic Exploration from Equilibrium (KL-E3)
Distribution-Based Active Exploration and the KL-Divergence Measure
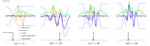
KL-E3 quadcopter (in blue) actively acquiring data to learn its stochastic model compared to a quadcopter acquiring data using an information-maximizing method (in green).
K-L divergence based control method focused on efficiently exploring high-dimensional search spaces safely for active, stable exploration. For efficient learning, we want to drive the exploration of the robot to prioritize obtaining more informative data. To do this, we defined an information distribution over the search space that represented the importance measure of the data (such as measures of linear independence from sparse Gaussian processes or measures representing model parameter uncertainty with respect to the search space). By defining the importance measure based on the state space, we generated a representation of the state space that prioritized states that generate highly informative data.
Using the KL-E3 method to actively acquire data to learn and match a distribution.
We then used information-based measures with hybrid control to generate controls that cover the search space and prioritizing high-information regions by matching the information distribution generated, while maintaining safety and stability constraints. The ergodic metric allows us to quantitatively define a measure that minimizes the distance between the information distribution and the time-averaged trajectory of the robot. Using it in the cost function allows us to generate controls that explore the full state-space while prioritizing high-information regions. The main limitation of the ergodic metric used in the active exploration algorithm is that the computational complexity of ergodicity exponentially increases with the dimensionality of the search space. To address this, we derive an active exploration algorithm using a sampling-based approximation of the ergodic metric using the Kullback-Leibler divergence metric. The sampling-based approximation allowed us to actively explore a much higher dimensional search space without sacrificing real-time control.
For more information about this project, check out the project page or the paper and its Github repository.
A robot using the KL-E3 method to sampling a state space (for Bayesian optimization) while taking into account dynamic constraints (keeping the cart double pendulum inverted).
Active Exploration for Learning Haptic Language
My work explores the idea of non-parametric learning for high-dimensional sensory spaces, specifically tactile exploration. Tactile exploration is a particularly interesting example of high-dimensional sensory exploration because, unlike vision, the exploratory motions used to obtain the data affect the data itself. That is, how you move across the texture affects the sensory data received. As such, learning and classifying texture data from exploratory motions can be a challenging problem.
Most of the work in tactile exploration either focus on learning to translate the sensory signals to physically interpretable characteristics. Others simplify the tactile exploration for generating discriminatory motions by either mimicking human exploratory motions or by building a library of motions to discriminate particular characteristics. The question I am exploring is, Can I learn textures and mappings of workspaces directly from the high-dimensional tactile sensory signals without trying to associate physical characteristics to the sensory signals?
Using the Biotac tactile sensor from SynTouch, Inc., a 19-dimensional tactile sensor that mimics the sensory capabilities of the human fingertip, I explore the use of unsupervised learning methods to learn, model, and classify textures without a prior library of texture definitions or predefined exploratory motions. Furthermore, using the K-L divergence-based exploration algorithm in conjunction with learning techniques for mixture models, I efficiently learn and map a texture space by prioritizing informative regions and motions for texture discrimination.
Ahalya Prabhakar
Lecturer and Associate Research Scientist
My research interests include robot active learning from high-dimensional sensory signals and human-robot interaction using information-theoretic algorithms.
Publications
A Predictive Model for Tactile Force Estimation using Audio-Tactile Data
Multimodal Sensory Learning for Real-time, Adaptive Manipulation
Dynamic Coverage for Active Learning From Equilibrium
Active Area Coverage from Equilibrium
Ergodic Exploration using Binary Sensing for Non-Parametric Shape Estimation
